教程和样本
Haply Inverse Unity 软件包辅以一套教程和示例项目,旨在说明软件包的功能,并促进实践学习体验。 这些资源面向初学者和高级用户,提供了逐步掌握触觉交互基础知识和探索更复杂使用案例的方法。
访问教程和示例
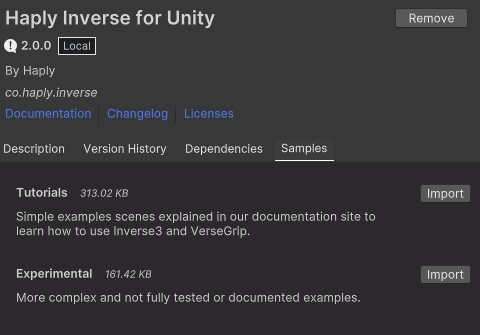
教程示例项目可通过Unity 包管理器随时获取,确保在项目中轻松集成和实验。
教程概述
探索我们的综合教程,旨在提高您对Haply Inverse Unity 软件包的熟练程度。 从基础概念到高级触觉反馈机制,这些指南都经过精心制作,通过代码示例和实用见解,让您逐步理解。
基本力与位置
本指南提供了一个简单的受力演示,并将Inverse3 光标的移动可视化。
基础力反馈
本教程将指导您创建一个包含刚度和阻尼的基本触觉模拟,模拟与球体等静态物体接触的物理特性。
设备工作区转换
本教程是对 "基本力反馈 "教程的扩展,演示了如何使用Inverse3 设备的空间变换属性和方法调整其位置、旋转和缩放。
动态场景中的力反馈
本指南以 "基本力反馈 "教程为基础,介绍如何在 Unity 中模拟动态交互,让用户感受移动物体的力反馈。
简单位置控制
本教程以入门指南中介绍的概念为基础,演示如何在 Unity 场景中使用动态游戏对象控制Inverse3 设备的光标位置。
VerseGrip 位置控制
本教程演示了如何使用 VerseGrip 的旋转功能直接控制Inverse3 设备的光标位置,绕过 Unity 主线程进行高频更新。
每个教程都旨在逐步提高您的技能,使您能够利用Haply 先进的触觉技术创造出具有触觉吸引力的互动体验。
实验样本
除结构化教程外,软件包还包括测试高级用例的实验样本。 这些示例的文档较少,应被视为探索性项目,可挑战Haply 硬件的极限。 它们提供了潜在应用的一瞥,并鼓励对软件包更高级功能的尝试。
结论
无论您是触觉技术的新手还是希望扩展知识,Haply Inverse Unity 软件包提供的教程和示例都能为您提供宝贵的见解和实践经验。 通过使用这些资源,您将更深入地了解如何将触觉反馈融入您的 Unity 项目,从而创建更身临其境的互动体验。
请记住,实验样本是创新的起点。 它们邀请您探索Haply 硬件和 Unity 强大开发环境的功能,挑战触觉交互设计的极限。