import Tabs from '@theme/Tabs'; import TabItem from '@theme/TabItem';
开始使用 VerseGrip 触控笔
VerseGrips 为Inverse3、Inverse3X 和MinVerse 增添了姿态追踪功能。本文概述了 VerseGrip 触控笔的设置流程及其功能。
VerseGrip 触控笔
VerseGrip 触控笔采用专有的高速无线通信技术,可实现方向追踪和手持输入/输出(I/O)功能。该产品专为满足多种应用场景的需求而设计,具有极高的通用性。
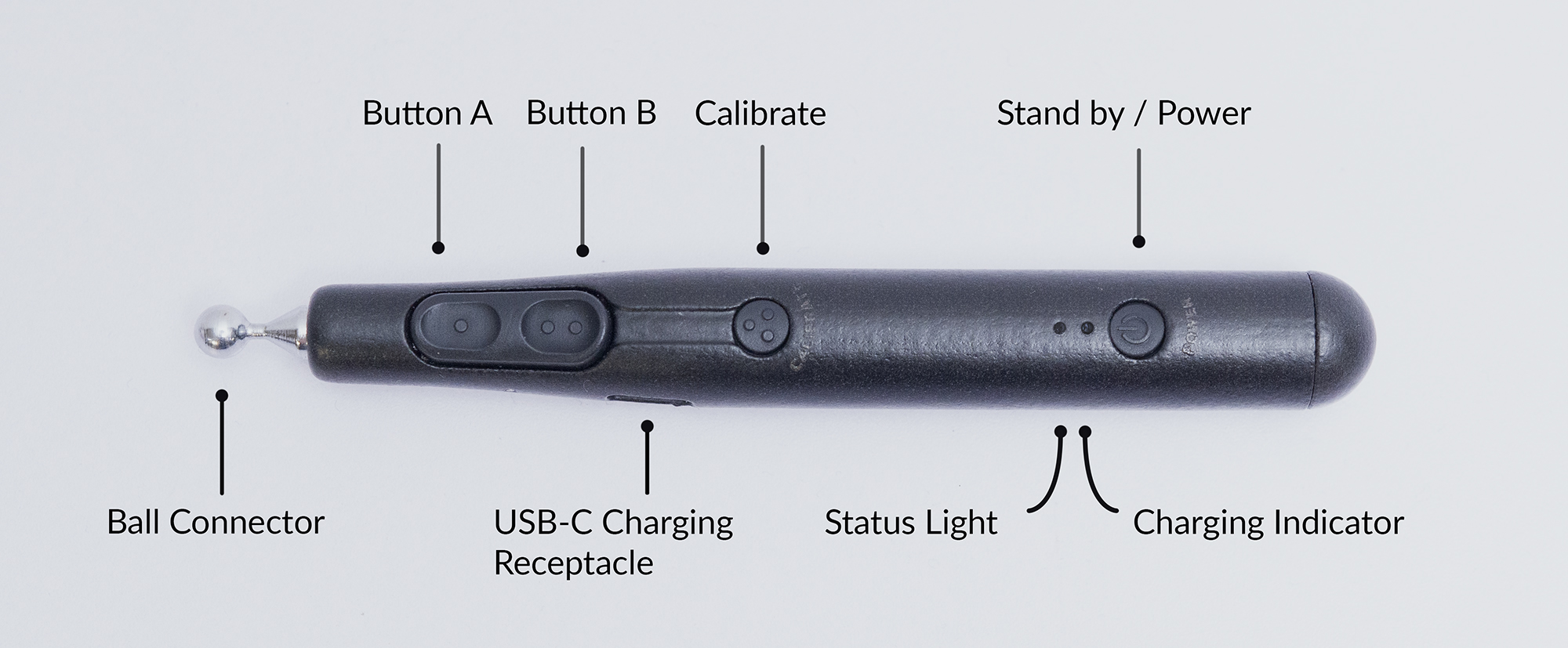
主要功能包括
- 2 个用户输入按钮、
- 1 个校准按钮、
- 1 个电源/待机按钮
- 2个状态指示灯
- USB-C 充电接口
- 无线通信速度高达 1 KHz
- 10-12 小时电池使用时间
- 一个频段上最多可有 8 个 VerseGrip Stylus 与加密狗配对
客户支持
如果您对设备或其操作有任何问题或疑虑,请联系我们的支持团队寻求帮助。VerseGrip 触控笔包含复杂的专有无线技术。打开设备将使您的保修失效,并可能导致设备无法使用。为避免延长运输时间和昂贵的维修费用,请勿打开设备。
VerseGrip 触控笔的设置和校准
本节概述了插入加密狗、打开 VerseGrip 触控笔和校准的步骤。
设置
- 将加密狗插入计算机的USB端口。
- 将手柄放在不会移动的平坦表面上,按键朝上,球形连接器朝向屏幕。
开机和校准
- 按一下电源按钮。状态指示灯将先变为红色,随后转为黄色,表示设备中的IMU正在进行自校准。
- 完成自校准后,触控笔将与计算机连接。
- 当触控笔成功连接并通过无线方式传输数据时,状态指示灯将闪烁绿色。
- 如果电量极低,VerseGrip 触控笔会每 2 分钟自动关机一次;请立即为其充电。
重新校准
校准过程会重置 VerseGrip 的坐标系,使得校准期间握持设备时的方向成为新的参考轴。
- 要重新校准,请将触控笔置于您希望校准的位置,按住校准按钮三秒钟,或直到模拟画面中的方向发生变化。
以下演示对比了设备未校准时与已校准时的行为表现。在进行演示时,必须按照图示配置握持VerseGrip,然后才能进行校准。

待机和关机
- 按一下电源按钮即可返回待机模式。状态指示灯将开始闪烁白色,数据传输将停止。
- 要关闭 VerseGrip 触控笔,请按住电源按钮 5 秒钟,然后松开。松手后,状态指示灯应该会熄灭,并且不会有任何指示。它将停止传输数据。
充电
- 通过 USB-C 充电端口为 VerseGrip 触控笔充电。
- 连接电源后,充电状态指示灯将持续显示蓝色,充满电后指示灯将熄灭。
- 如果在连接电源时触控笔处于关闭状态,它会自动开启。
警告:如果您拥有的VerseGrip触控笔是在2024年8月至12月期间发货的——请勿让电池完全放电。一旦电量耗尽,电池可能无法再次充电。如果发生这种情况,只要VerseGrip触控笔保持连接电源,它就能继续工作。请Haply 以获取固件更新文件,从而解决此问题。
状态和指示灯
| 颜色 | 灯光序列 | 说明 |
|---|---|---|
| 黄色 | 快速淡入/淡出 | 初始自动传感器参考校准(将VerseGrip平放在桌面上) |
| 快速眨眼 | 按下方向校准按钮,校准过程已启动 | |
| 实心 | 已按下方向校准按钮,校准完成 | |
| 红色 | 快速淡入/淡出 | 适配器已断开连接,未收到主机信号 |
| 快速眨眼 | 按下电源按钮,关机过程已启动 | |
| 绿色 | 淡入/淡出 | 适配器已连接,VerseGrip 处于活动数据流模式 |
| 实心 | 适配器已连接,VerseGrip 处于活动数据流模式,USB 供电已连接 | |
| 白色 | 淡入/淡出 | 适配器已连接,VerseGrip 处于空闲/待机模式,无数据传输 |
| 实心 | 适配器已连接,VerseGrip 处于空闲/待机模式,无数据传输,USB 供电已连接 | |
| 橙色 | Flash(隔行扫描) | 电量不足警告指示,通知在当前状态下交替显示 |
| 双闪(隔行扫描) | 电池电量极低警告指示,通知与当前状态交替显示 | |
| 青绿色 | 淡入/淡出 | 设备固件更新模式 |
| (更明亮) | 实心 | 用户按下按钮后,当前指示灯颜色变为实心且更亮 |
| 关闭 | 无光 | 关机,断电 |
| 电量指示灯颜色 | 灯光序列 | 说明 |
|---|---|---|
| 蓝色 | 实心 | 充电 |
| 快速眨眼 | 充电即将完成 | |
| 关闭 | 无光 | 充电完成 |
旧版状态和指示灯
下方的状态指示灯显示的是VerseGrip触控笔早期版本(固件1.10及以下)中的状态和颜色。
| 颜色 | 灯光序列 | 说明 |
|---|---|---|
| 红色 | 实心 | 待初始化组件 |
| 眨眼 | 待机模式。不进行数据传输 | |
| 蓝色 | 实心 | 初始自动传感器参考校准(将VerseGrip平放在桌面上) |
| 绿色 | 眨眼 | 适配器已连接,VerseGrip 处于活动数据流模式 |
| 关闭 | 无光 | 关机,断电 |
| 电量指示灯颜色 | 灯光序列 | 说明 |
|---|---|---|
| 蓝色 | 实心 | 充电 |
| 快速眨眼 | 充电即将完成 | |
| 关闭 | 无光 | 充电完成 |
代码示例
以下是一个关于如何在 C++ 中使用 VerseGrip 触控笔的简单示例。
#include <external/libhv.h>
#include <nlohmann/json.hpp>
#include <chrono>
#include <cstdio>
#include <string>
using namespace hv;
using json = nlohmann::json;
// Procedure to get the first detected and available Wired VerseGrip Stylus device id
std::string get_first_verse_grip_device_id(const json &data) {
const auto& vgs = data["wireless_verse_grip"];
if (vgs.empty()) {
return "";
}
return vgs.items().begin().key();
}
int main() {
const auto print_delay = std::chrono::milliseconds(100);
auto current = std::chrono::high_resolution_clock::now();
bool first_message = true;
std::string device_id;
WebSocketClient ws;
ws.onmessage = [&](const std::string &msg) {
json data = json::parse(msg);
if (first_message) {
first_message = false;
const std::string first_id = get_first_verse_grip_device_id(data);
if (first_id.empty()) {
printf("no Wireless VerseGrip found.\n");
ws.close();
return;
}
device_id = first_id;
}
if (device_id.empty() || !data["wireless_verse_grip"].contains(device_id)) {
return;
}
const auto now = std::chrono::high_resolution_clock::now();
if (std::chrono::high_resolution_clock::now() > current + print_delay) {
current = now;
const json state = data["wireless_verse_grip"][device_id];
printf("Rotation : { x:%f, y:%f, z:%f, w:%f }, Hall:%i, Button : [%d, %d, %d], Battery: {%f}\n",
state["orientation"]["x"].get<float>(),
state["orientation"]["y"].get<float>(),
state["orientation"]["z"].get<float>(),
state["orientation"]["w"].get<float>(),
state["hall"].get<int8_t>(),
state["buttons"]["a"].get<bool>(),
state["buttons"]["b"].get<bool>(),
state["buttons"]["c"].get<bool>(),
state["battery_level"].get<float>());
}
};
ws.open("ws://localhost:10000");
printf("Press ENTER to stop...\n\n");
while (std::cin.get() != '\n') {
}
if (ws.isConnected()) {
ws.close();
}
return 0;
}
#include <string.h>
#include <chrono>
#include <iostream>
#include <iterator>
#include <string>
#include <thread>
#include "HardwareAPI.h"
int main(int argc, char* argv[])
{
char* portName;
if (argc < 2)
{
std::printf("Usage: %s <port>\n", argv[0]);
}
else
{
#if defined(_WIN32) || defined(_WIN64)
portName = _strdup(argv[1]); // argv1;
#endif
#if defined(__linux__)
portName = strdup(argv[1]); // argv1;
#endif
}
Haply::HardwareAPI::IO::SerialStream serial_stream(portName);
Haply::HardwareAPI::Devices::Handle handle(&serial_stream);
while (true)
{
Haply::HardwareAPI::Devices::Handle::VersegripStatusResponse data;
data = handle.GetVersegripStatus();
std::printf(
"device_id: %d battery_level: %f quaternion: %f %f %f %f buttons: "
"%d error_flags: %d\n",
data.device_id, data.battery_level, data.quaternion[0],
data.quaternion[1], data.quaternion[2], data.quaternion[3],
data.buttons, data.error_flag);
}
}