HARP入门指南
(人类先进机器人平台)
本文介绍了HARP的基本操作和设置方法。阅读完本文后,您将能够远程操控连接到您系统的机器人。
开始之前
如果您尚未设置Inverse 3 VerseGrip 触控笔,请参阅《 Inverse3入门指南》和《VerseGrip 触控笔入门指南》。
HARP的安装
下载HARP 后,运行安装程序。安装过程非常简单,完成后应用程序将自动启动。
待办事项 - 添加harp
许可证验证
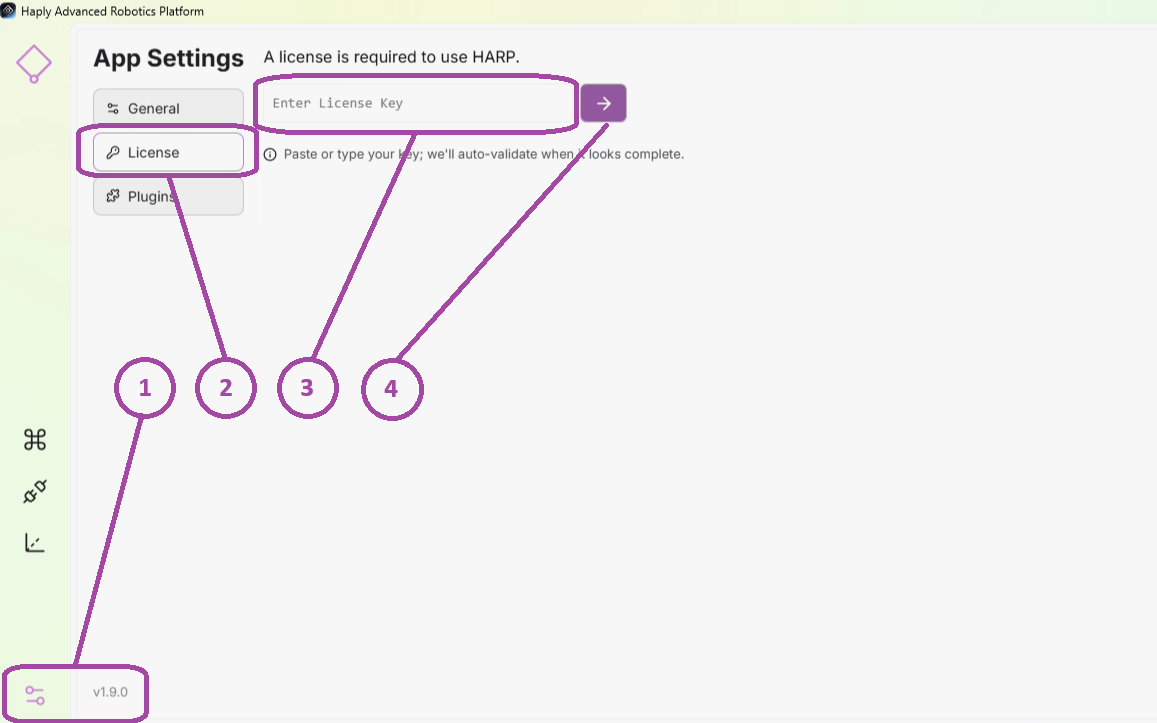
HARP 完成后,(1) 进入设置,(2) 选择“许可证”菜单列表,(3) 输入您的许可证密钥,(4) 点击以验证许可证
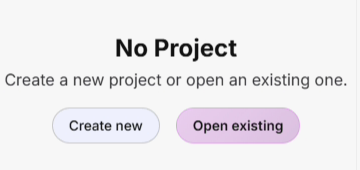
创建项目
首先创建一个新项目。为项目命名,并选择项目所在的目录。
连接设备
主设备
请确保 Leader 设备已连接。屏幕上应显示Inverse 3 VerseGrip。如果未看到其中一台设备,请检查电源,并确保 VerseGrip 的 USB 适配器已连接到电脑。
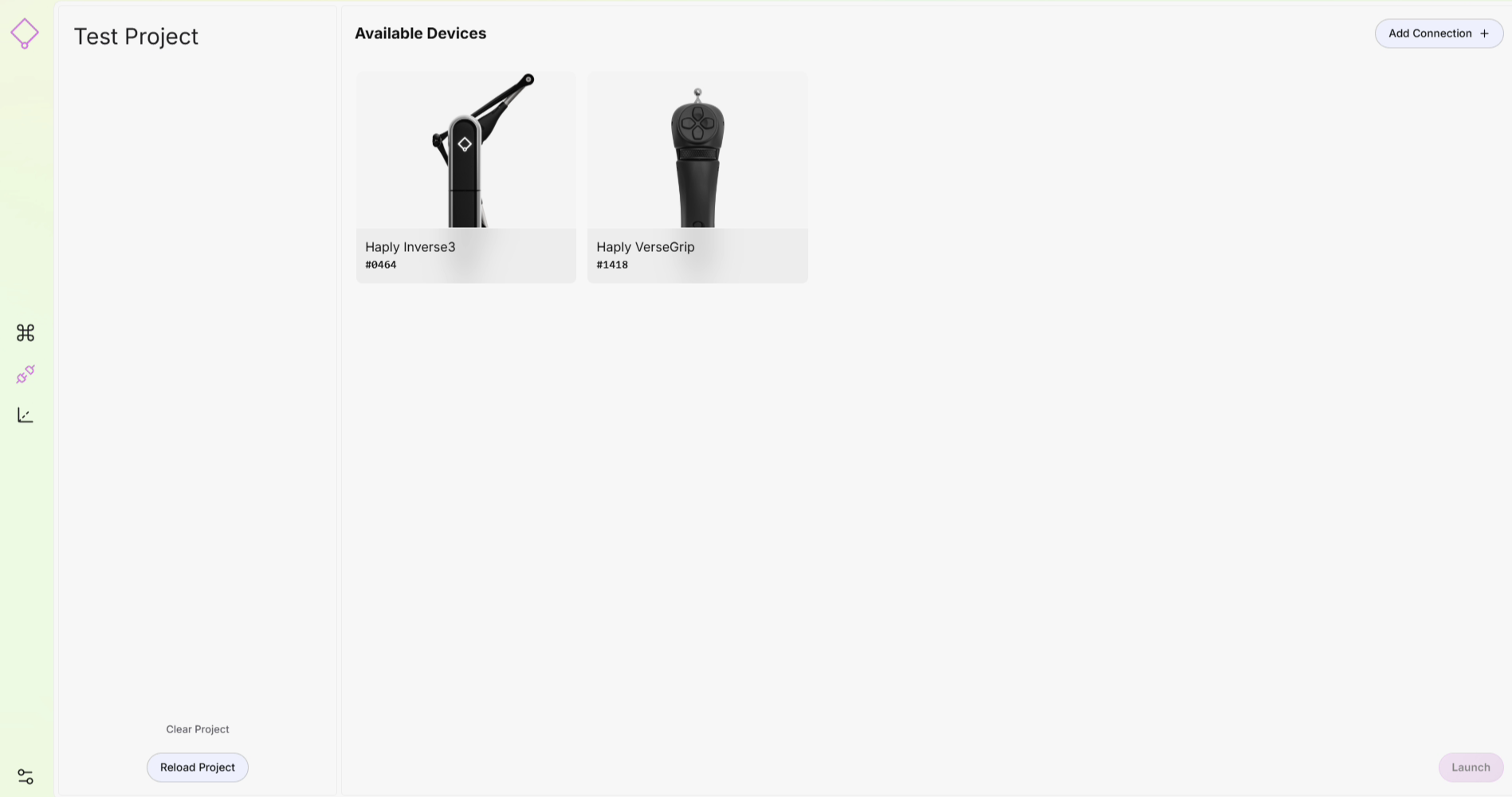
从属设备
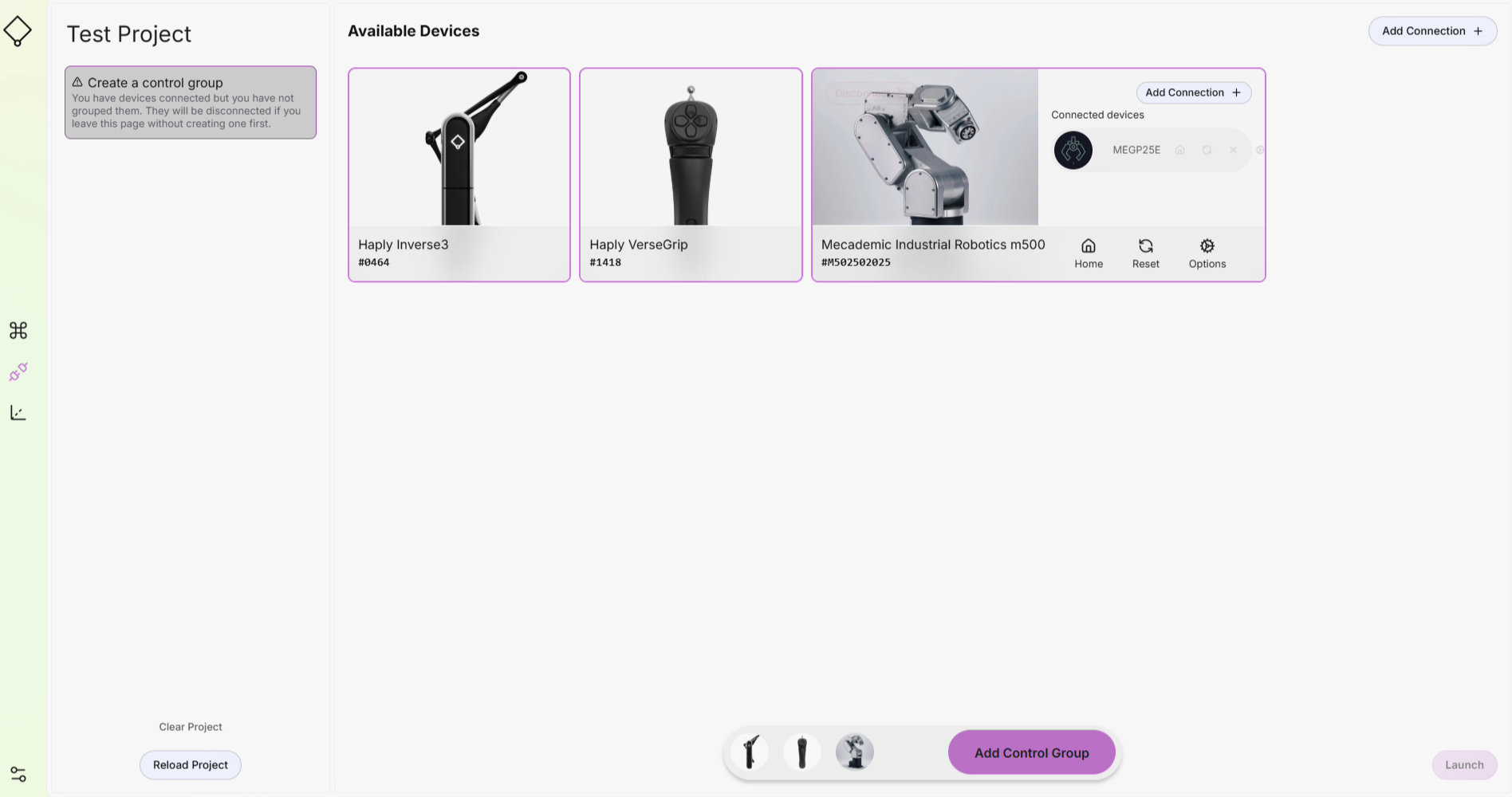
要连接我们的从属设备,“添加连接”功能可让我们连接机器人、力/扭矩传感器以及末端执行器。
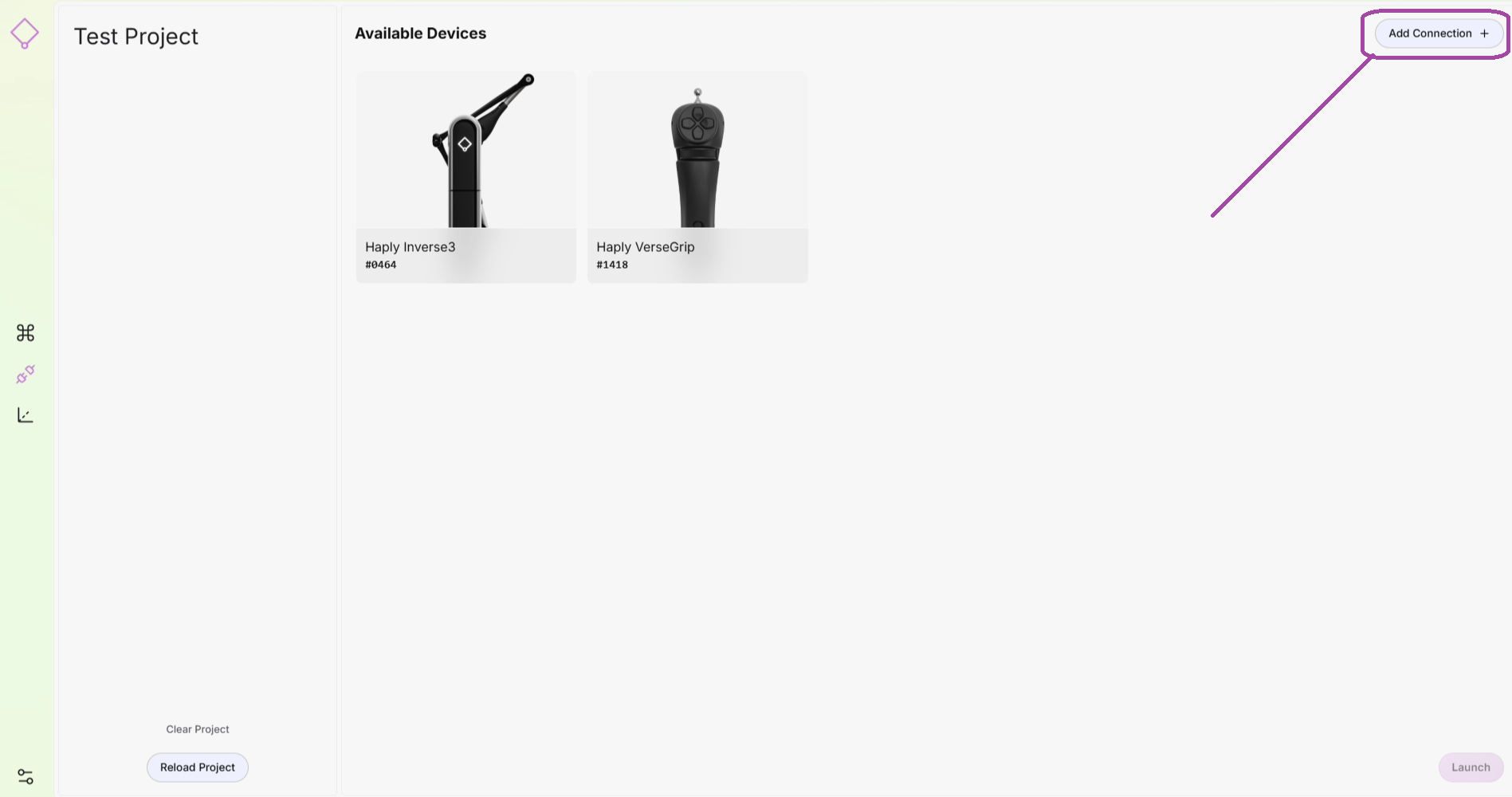
首先从机械臂开始,从下拉列表中选择机器人,并输入连接字符串。点击“连接”
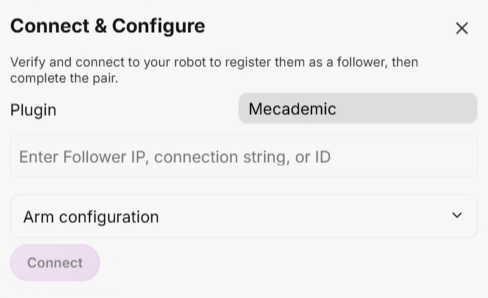
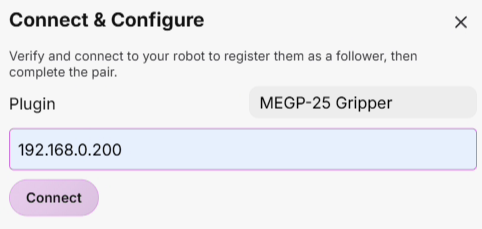
添加一个抓取器,然后在已连接的机器人磁贴上点击“添加连接”。
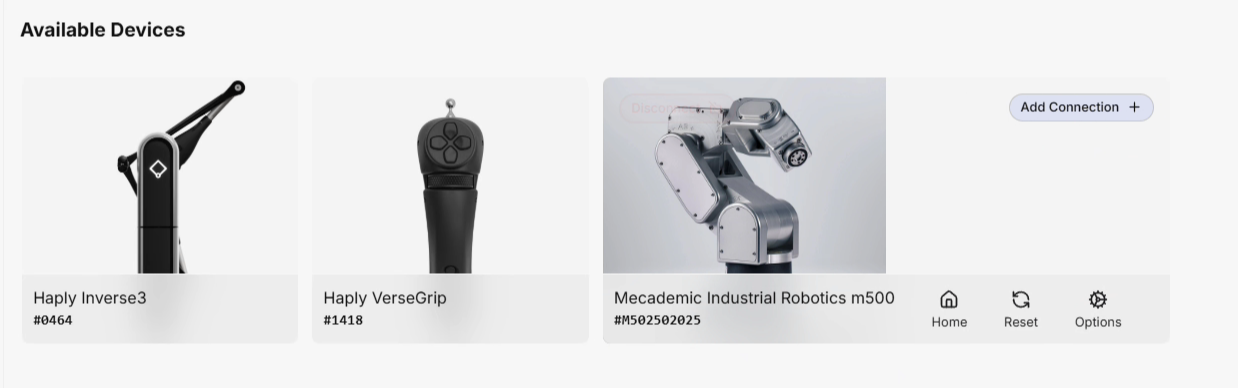
从下拉菜单中选择一个末端执行器,并输入连接字符串。点击“连接”。
现在您的设备已开启并连接,让我们创建一个控制组。点击您希望添加到控制组中的每个设备磁贴。选中后,它们会聚集在底部,此时请点击“添加控制组”按钮。
您将在左侧的项目窗格中看到控组。
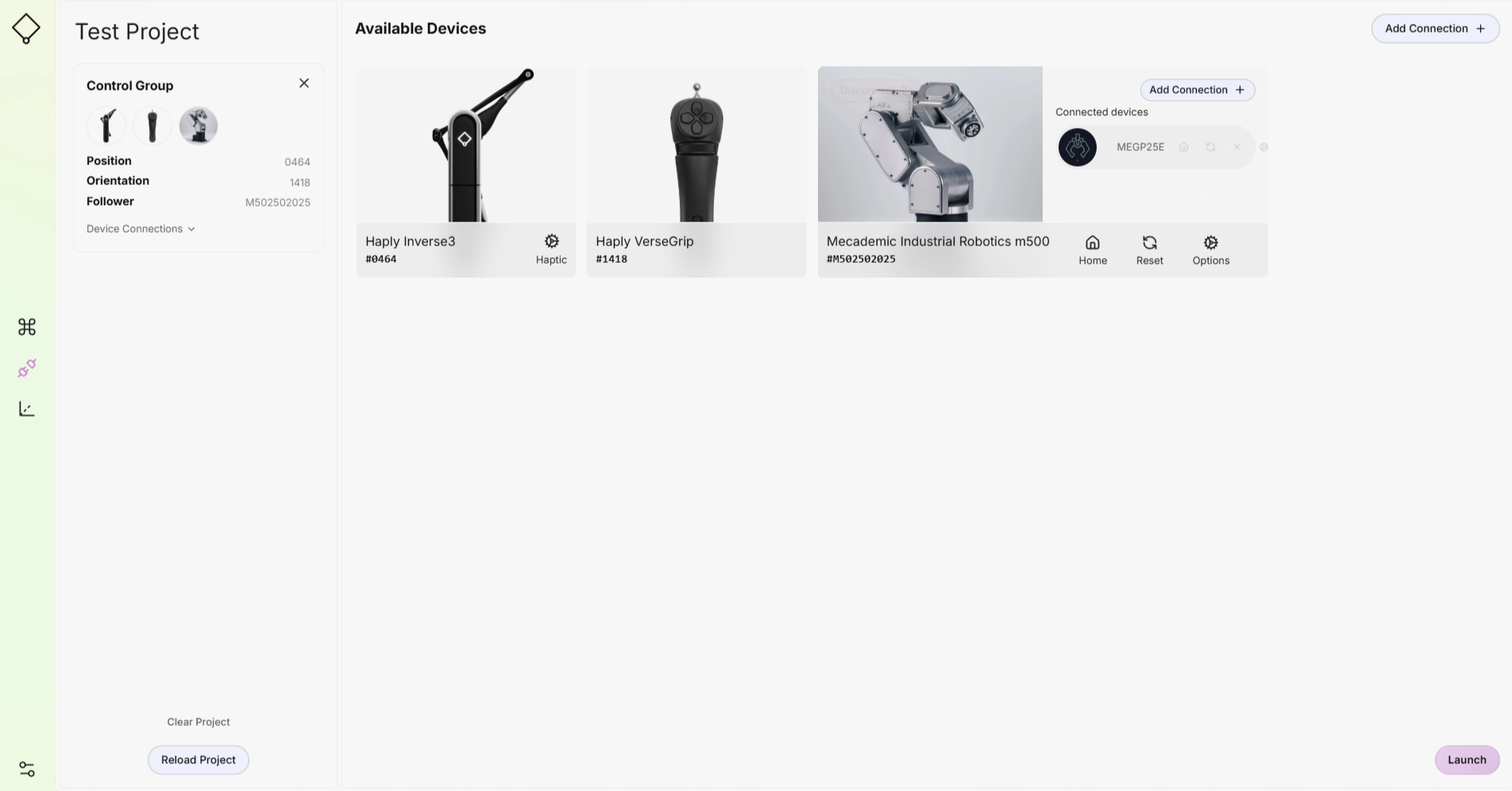
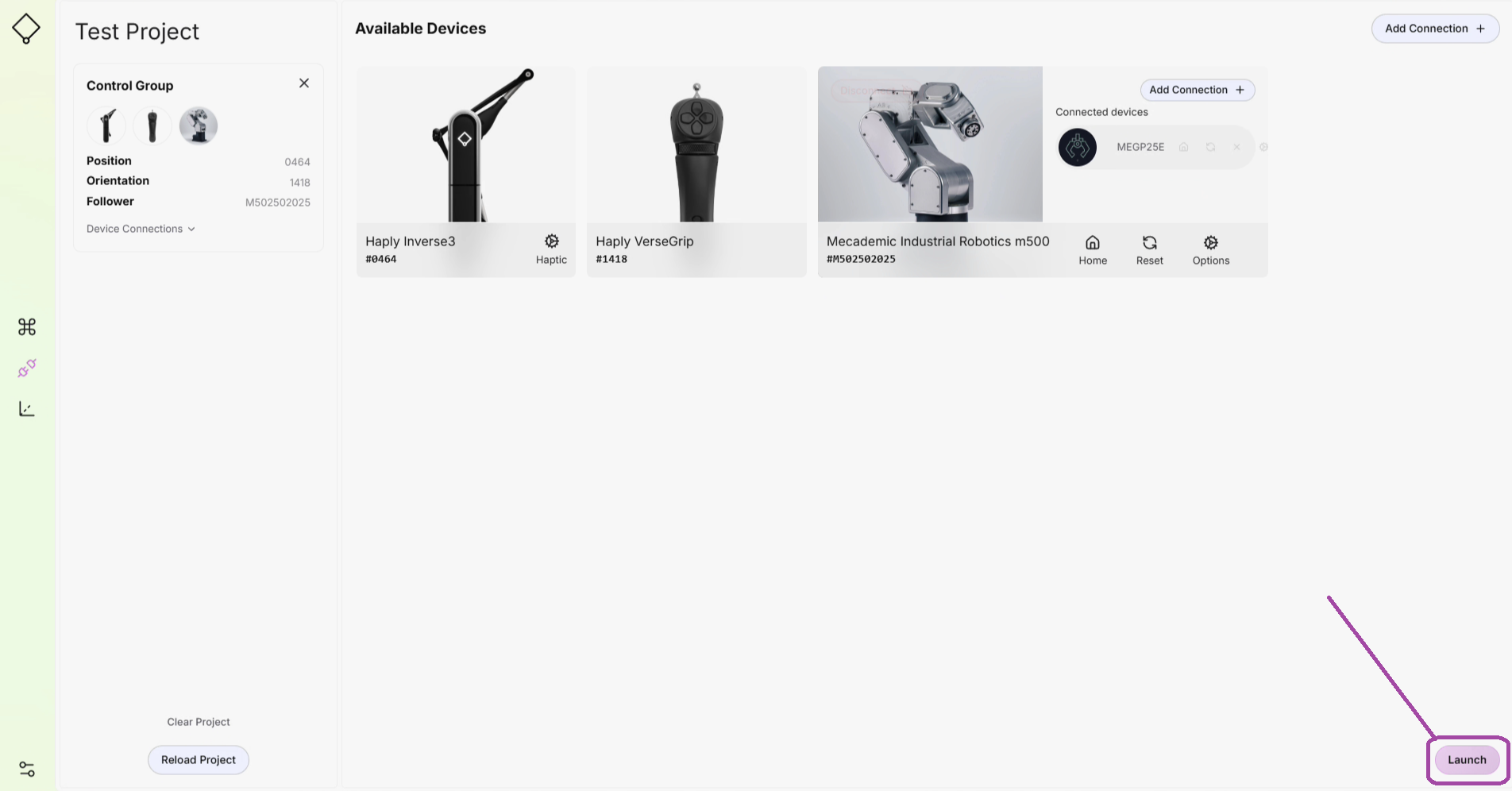
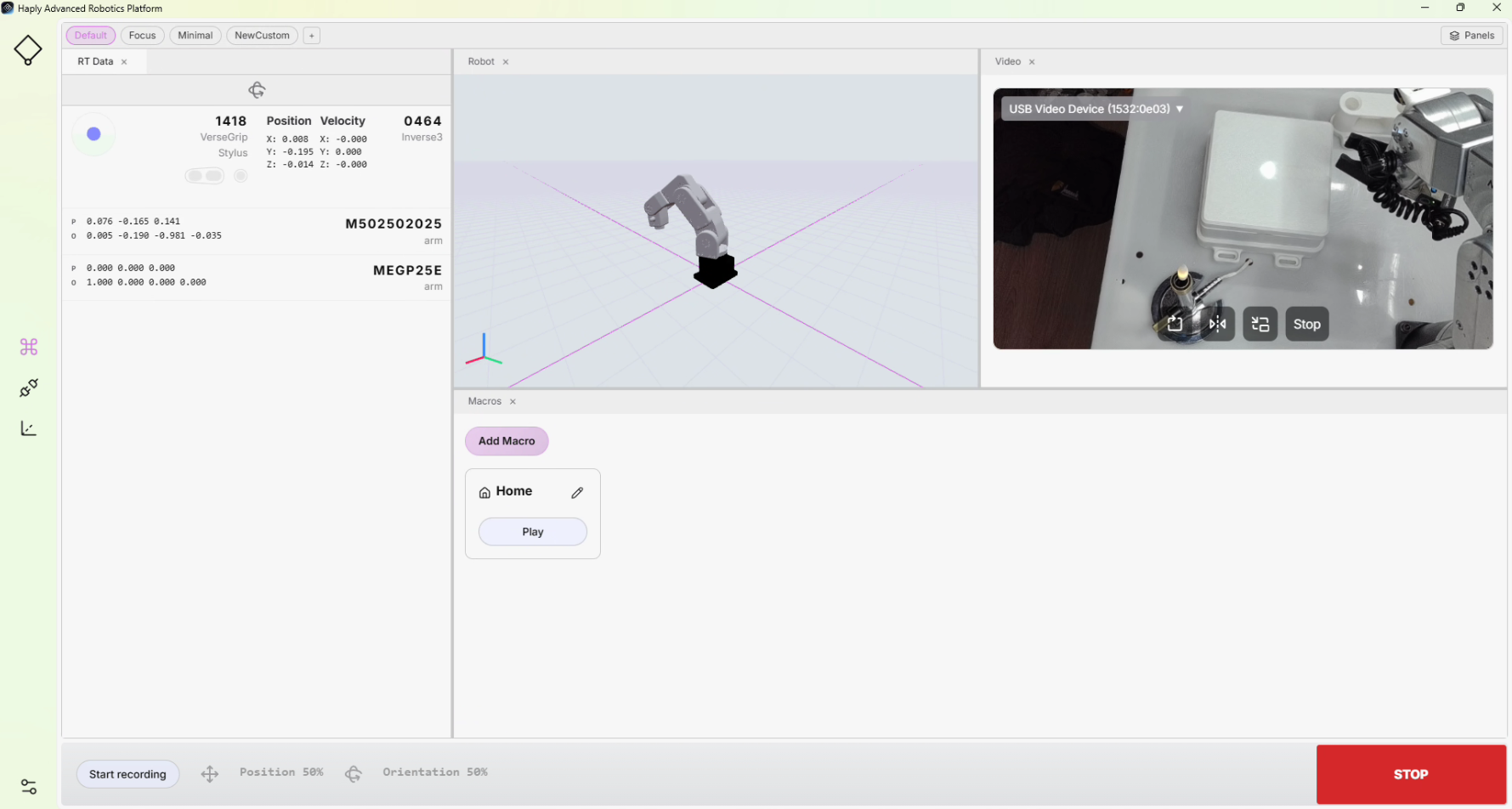
您已成功连接所有设备,请按下“启动”按钮进入控制界面,在那里我们可以操控机器人
远程操作
目前您尚未设置任何限制,也没有任何界限。请务必注意安全,循序渐进,并在着手进行任何严肃的控制工作之前,先了解系统的运作原理。
“停止”按钮(右下角),可让用户停止机器人的运动,直到按下“重置”按钮为止。(按“Esc”键也可停止机器人)
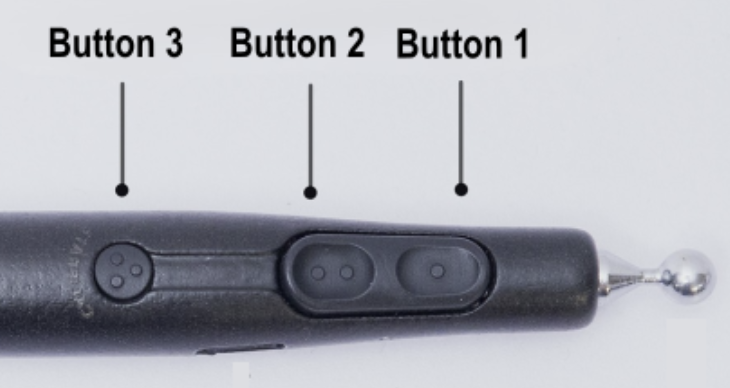
VerseGrip 将按钮 1 用于离合器。
- 离合器未踩下 — 此时您可以自由移动设备,而机器人不会随之移动。
- 离合器已压下 — 机器人随Inverse 3 的Inverse 3 而移动。