快速入门:触觉高级机器人平台 (H.A.R.P)
最后,您将了解 H.A.R.P. 的基本操作和正确使用软件包的操作顺序。
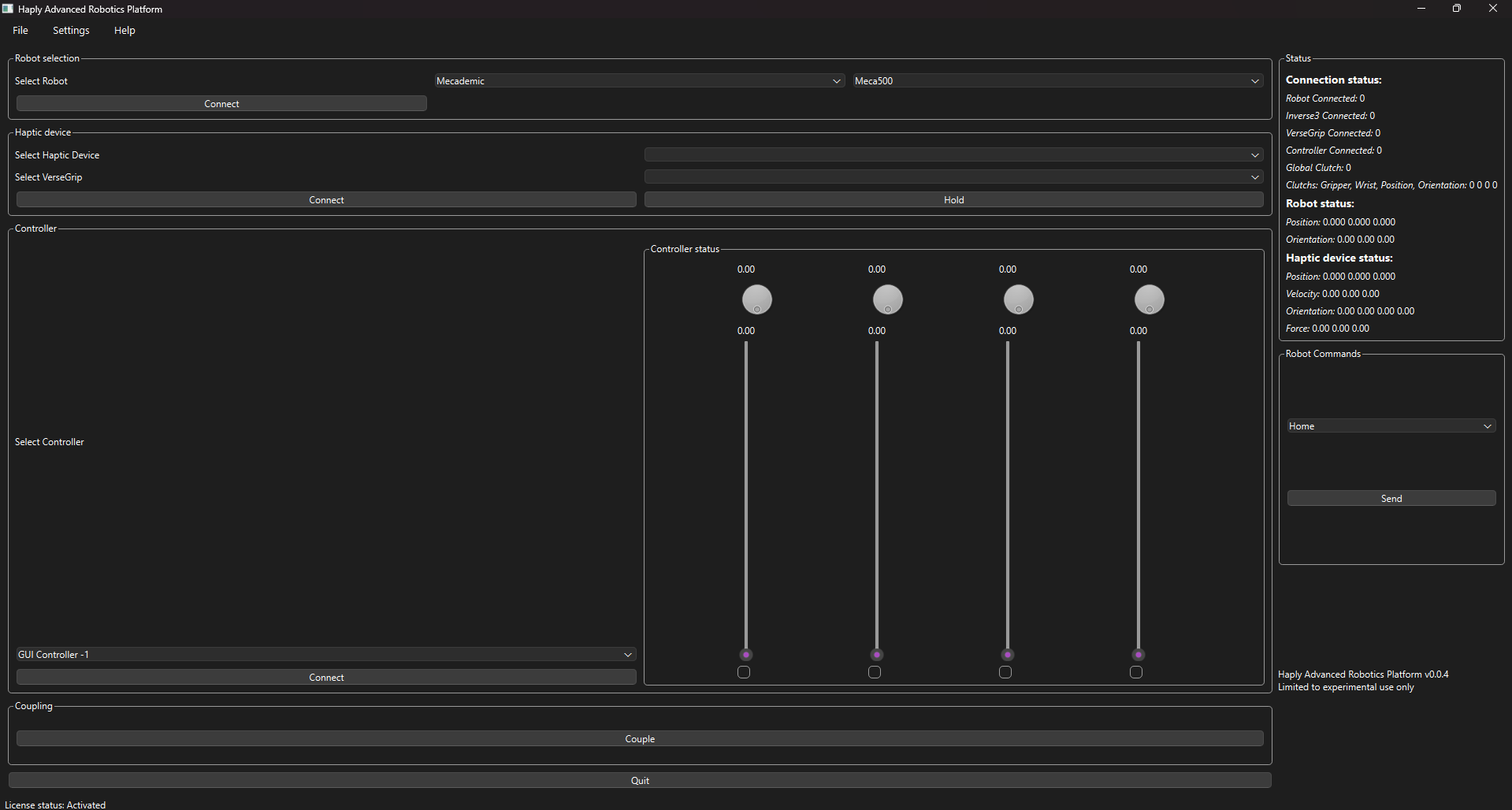
概述
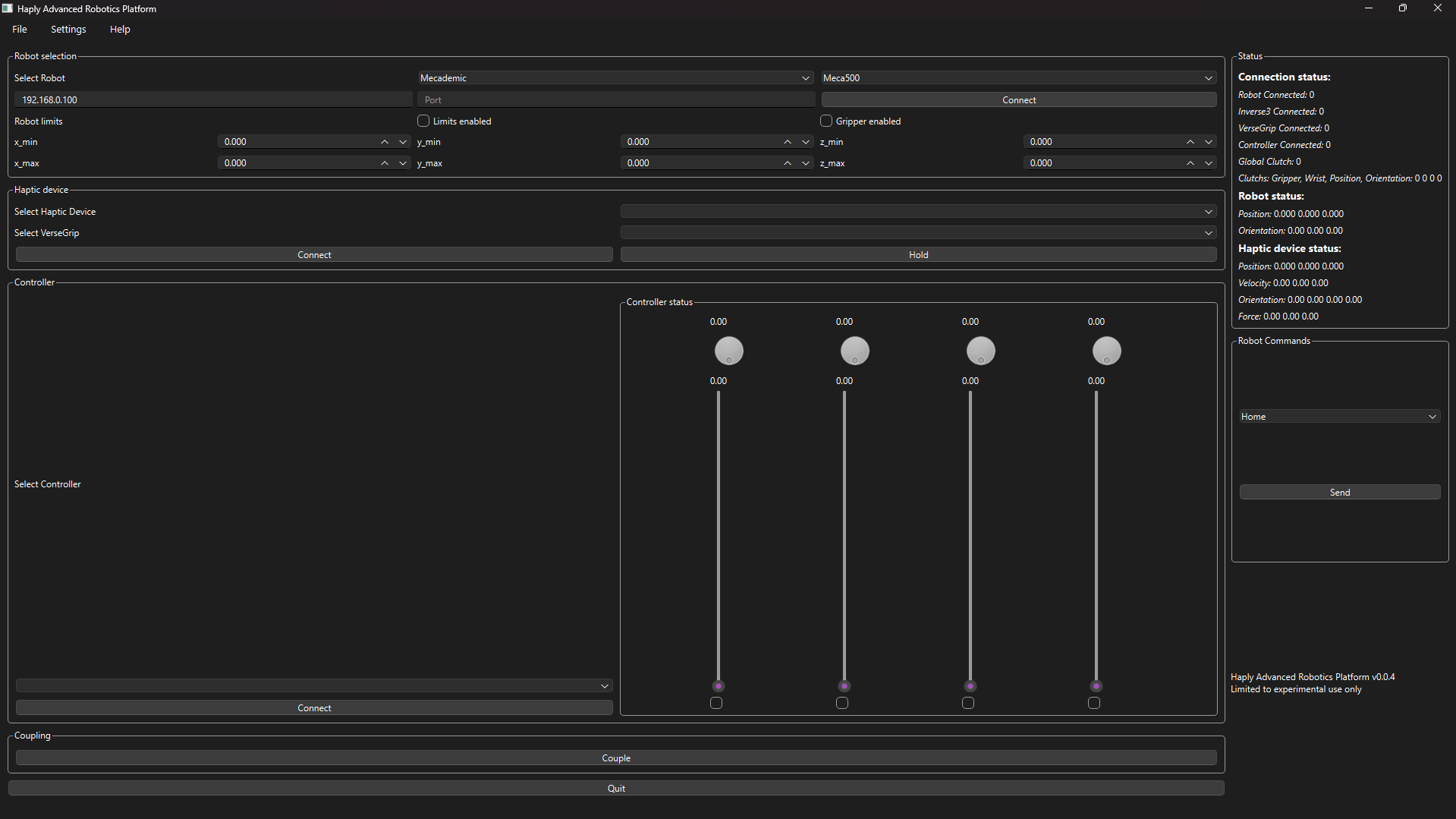
H.A.R.P 计划共有 10 个部分。
- 文件菜单
- 设置菜单
- 帮助菜单
- 退出键
- 机器人选择框
- 触觉装置箱
- 控制器方框
- 联接盒
- 状态框
- 机器人命令框
帮助 "菜单和 "退出 "按钮的作用不言自明,因此不再详细说明。
在启动 H.A.R.P 程序之前,请确保所有硬件都已通电并连接到控制计算机。
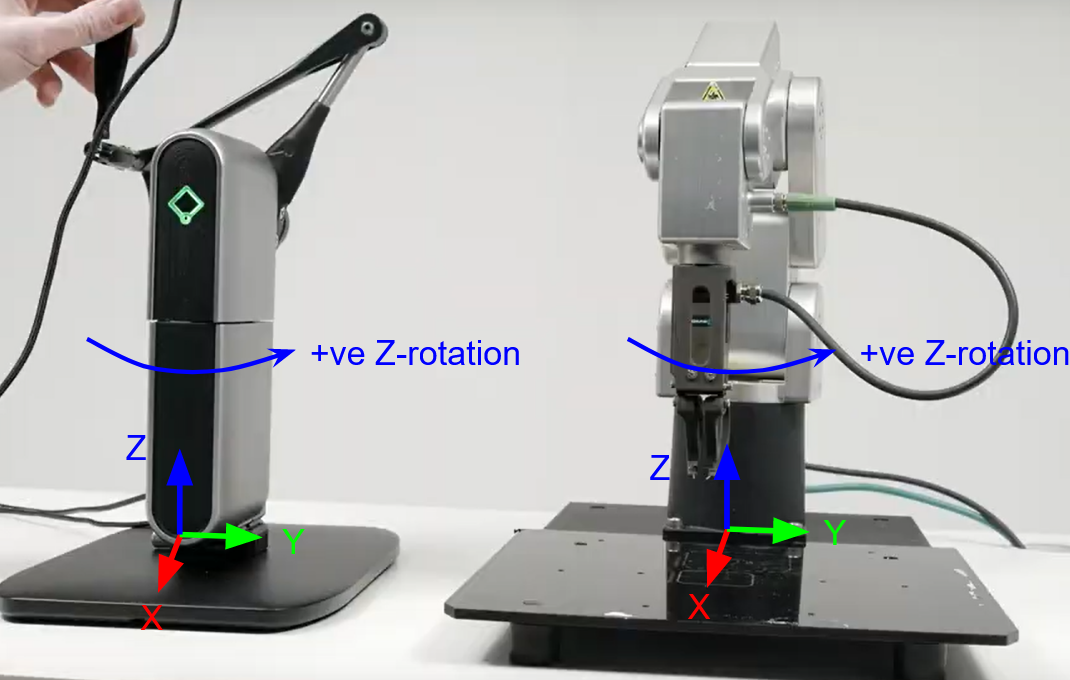
硬件设置
默认情况下,H.A.R.P 设置为在以下方向使用反演和机器人,注意显示的是右手反演,相对位置并不重要。
激活许可证
第一次打开 H.A.R.P 时,第一步是输入提供的许可证密钥,没有许可证,只有Inverse 3 可以运行,其他一切都无法运行。

从文件菜单中选择许可证

输入提供的许可证密钥并按激活。
每个用户账户/计算机只需完成一次此过程
连接机器人
使用 H.A.R.P 的第一步是连接要控制的机器人,目前官方只支持 Mecademic Meca500。

选择机器人并输入连接信息
首先选择要控制的机器人公司,然后选择机器人型号。
接下来输入用于连接机器人的 IP 和端口,有关正确过程的更多信息,请参考制造商提供的手册。
设定限制
如果您希望对正在操作的机器人设置软件限制,请选中启用限制框,并在提供的框中输入您希望使用的限制值
机械手操作
如果您连接了机械手,请务必勾选启用机械手复选框,如果您连接了机械手但没有勾选复选框,程序将无法运行,反之亦然。
完成上述步骤后,单击 "连接 "按钮,将机器人连接到 H.A.R.P,此时状态框中应显示机器人的状态。
连接Haply Inverse 和 VerseGrip

如果您在启动 H.A.R.P 之前正确设置了Haply Inverse 3 和 VerseGrip 并将其连接到控制计算机,它们应该会出现在相应的下拉菜单中。只需选择正确的设备并单击连接按钮,设备状态就会显示在状态框中。
保持按钮
保持按钮可用于告诉Inverse 3 利用其力度控制功能保持在原位,可随时激活,但我们不建议使用超过几分钟,这在安全操作部分有说明。
连接额外的控制器
要为 H.A.R.P. 提供更多功能,还可连接额外的控制器,如 Midi Sidekick 等硬件控制器,或直接使用内置图形用户界面控制器。

侧翼
只要在启动 H.A.R.P 之前 sidekick 已经连接到控制电脑,它就会出现在下拉菜单中。只需选择它并按下连接即可。请确保移动所有旋钮和滑块,将其数值从 0 改为 0,因为在移动这些旋钮和滑块之前,控制器在启动后不会更新。
请注意,如果您选择/连接了侧踢控制器,则无法通过图形用户界面控制输入
Gui 控制器
如果您只想使用内置的 Gui 控制器,只需从下拉菜单中选择它并按下连接,然后就可以拖动/点击不同的 Gui 元素来更改数值。
耦合一切
连接好机器人、Inverse 3 和额外控制器(可选 VerseGrip)后,按下耦合按钮即可将它们全部连接起来。反向器将立即控制机器人,因此在按下该按钮之前,请务必握住反向器的手柄。
注意,在使用机器人指令菜单之前,请确保将所有内容解耦,否则反相器也会移动。
状态菜单
状态菜单显示大部分设备信息和离合器状态。
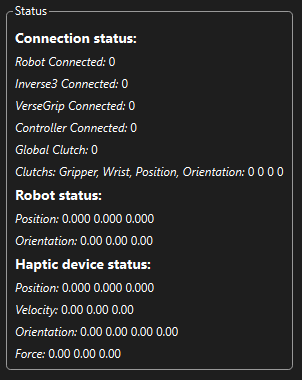
顶部显示所有四个可能的硬件设备的连接状态,这将告知您是否正确连接了所有设备,1 表示连接,0 表示断开连接。
下面显示的是全局离合器状态,0 表示您正在控制机器人,1 表示控制堆栈的该部分暂停控制。
接着,显示机器人的位置和末端效应器的方向(使用欧拉角)。
最后,将显示逆位置和速度,以及 versegrips 的方向(以 wxyz 四元数表示),然后显示发送给逆的当前渲染力。
机器人指令

最后一个控制部分是机器人指令,用户可以选择向连接的机器人发送预定义指令,目前只提供 "原点 "和 "船位 "指令。这允许用户在机器人处于尴尬位置时将其带回原位,以及在存放和运输机器人时将其带回船位。
录音
通过录制菜单,用户可以录制反向器发出的机器人指令,并在最后进行正向和反向重放,还可以提高或降低重放速度。
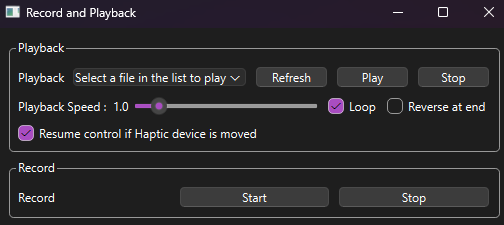
尝试录制机器人指令时,请使用下方的录制菜单,按下开始键开始录制过程,完成要录制的动作后再按下停止键。停止录制后,请务必夹紧机器人。
录音完成后,选择是否要循环播放,和/或在结束时反转 cmds。然后按下刷新按钮,程序就会搜索可用录音,选择要重放的录音并按下播放键,如果选择了循环播放,则在重放结束时按下停止按钮。用户还可以选择在触觉设备移动时恢复控制,这样就可以停止重放,并在反向设备移动时恢复触觉控制。否则,一旦按下停止按钮,就必须先松开机器人,才能重新获得控制权。
此外,您还可以使用提供的滑块提高或降低播放速度。
用户首选项
通过用户偏好菜单,用户可以保存自己喜欢的所有设置,从而大大加快启动速度。
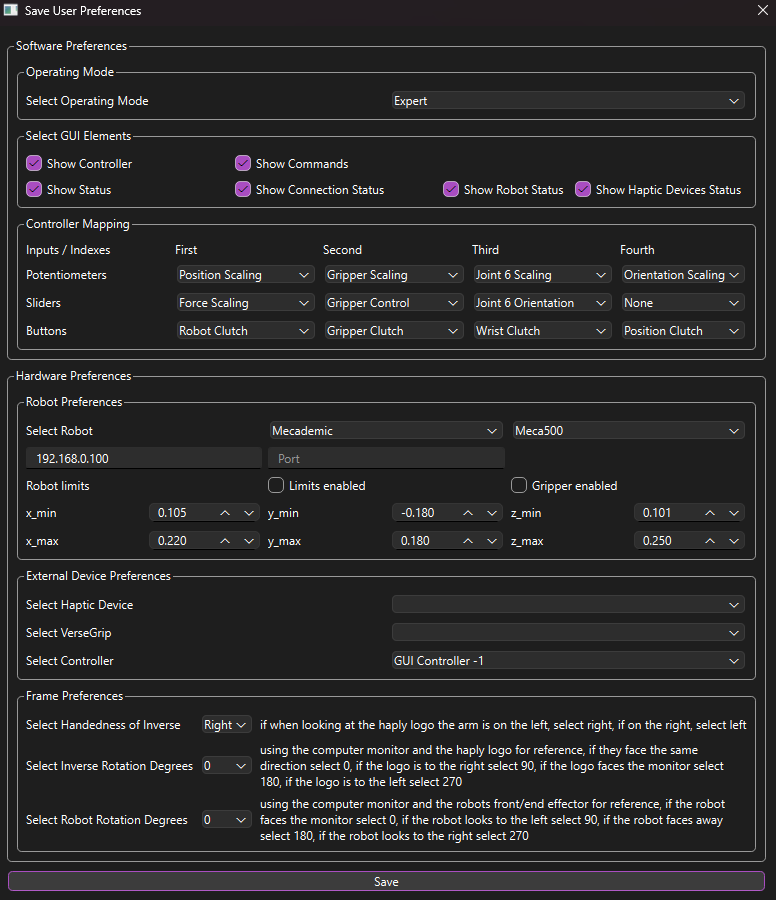
软件首选项
第一个选项是用户希望 H.A.R.P 主控制菜单采用的操作模式,可选项有专家(默认)、高级和简单。下文将进一步解释高级和简单操作模式。
接下来,用户可以通过选中或取消选中不同的方框来决定显示或隐藏某些图形用户界面元素
之后,用户可以自定义 GUI 控制器和侧踢控制器上的每个电位器、滑块和按钮的功能。电位器和滑块选项完全可以互换,用户可以根据自己的喜好自定义缩放和控制。
硬件首选项
首先,用户可以调整并保存要连接的机器人,并保存要使用的限制。这与机器人在专家操作模式下的可用菜单相匹配,数值将从该菜单中复制,因此无需再次输入。
接着,可以保存想要使用的不同外部设备,包括触觉设备、VerseGrip,以及是否要默认使用 midi sidekick 控制器的图形用户界面控制器。
最后,如果用户的物理设备设置与 H.A.R.P. 使用的默认设置不一致,用户可以输入设置方式,目前只支持围绕垂直轴的方向变化。最重要的选项是告诉 H.A.R.P.,您使用的是右手反向还是左手反向,因为这会改变控制方案。下文将进一步解释 H.A.R.P. 使用的框架约定。
运行模式
除了默认的专家模式外,用户在填写并保存首选项对话框后,还可以切换到高级或简单模式,以加快启动速度,减少图形用户界面的混乱。
高级模式删除了一些机器人选项,但仍允许用户在设备之间切换并保留完全控制权
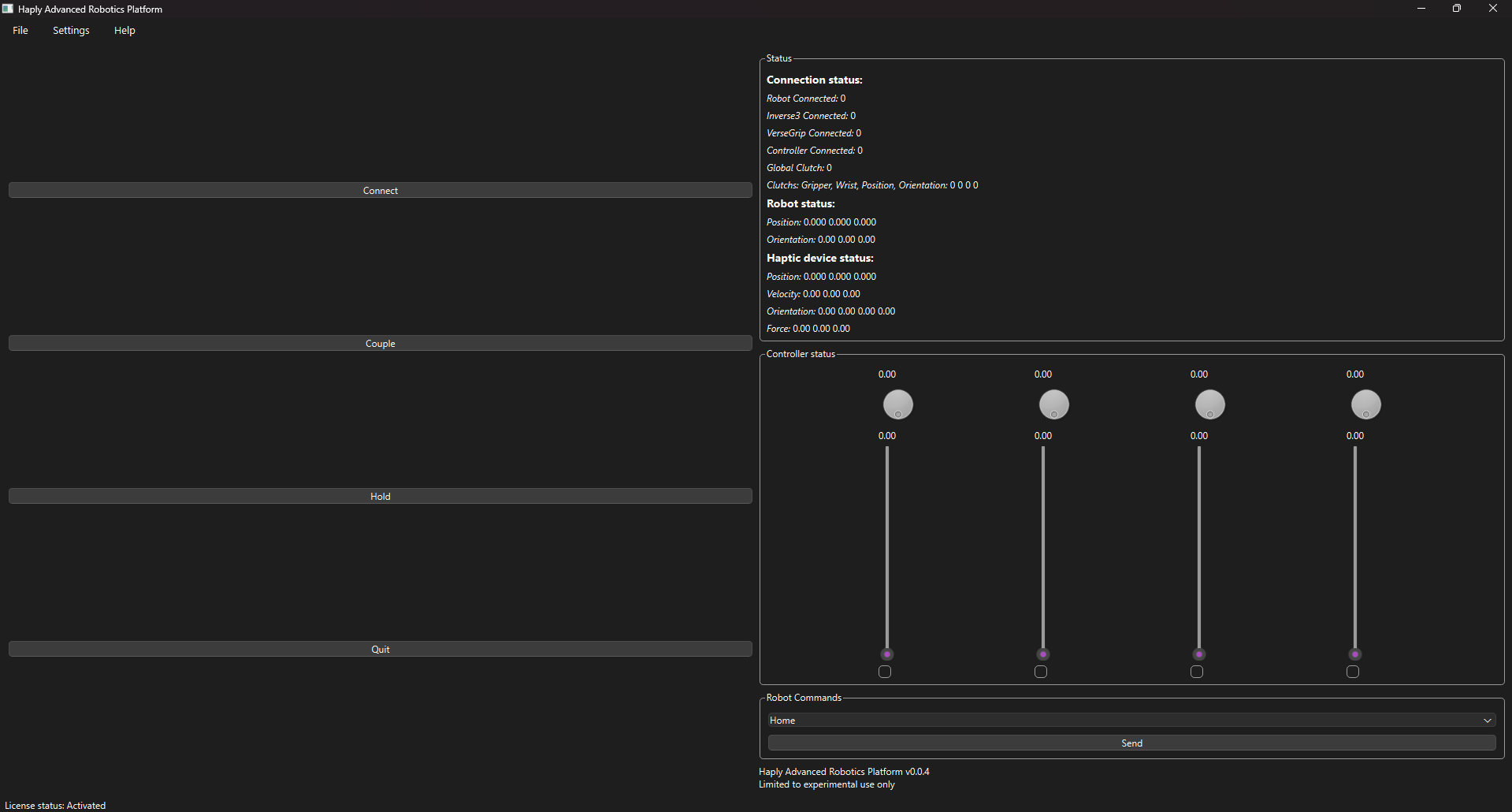
简单模式删除了大部分选项,只留下连接按钮、保持按钮、耦合按钮和退出按钮。此外还有状态菜单、控制器状态和机器人命令菜单。
框架约定
上图所示为用于将逆向器连接到机器人的框架,请注意还有一个基于控制计算机屏幕大致方向的中间框架。选项以 90 度为增量变化,同时只考虑垂直轴方向。选择相对方向时,使用右手定则找出机器人或逆向器与计算机屏幕之间的角度变化。
此外,当使用手柄控制机器人末端执行器的方向时,请校准面向机器人末端执行器的手柄,以设置其参考框架,无需在提供的菜单中选择旋转。